A Model-Based Sensor Fusion Approach for Force and Shape Estimation in Soft Robotics Article Swipe
Related Concepts
Stefan Escaida Navarro
,
Steven Nagels
,
Hosam Alagi
,
Lisa-Marie Faller
,
Olivier Goury
,
Thor Morales Bieze
,
Hubert Zangl
,
Björn Hein
,
Raf Ramakers
,
Wim Deferme
,
Gang Zheng
,
Christian Duriez
·
 YOU?
·
· 2020
· Open Access
·
· DOI: https://doi.org/10.1109/lra.2020.3008120
· OA: W3037969311
YOU?
·
· 2020
· Open Access
·
· DOI: https://doi.org/10.1109/lra.2020.3008120
· OA: W3037969311
YOU?
·
· 2020
· Open Access
·
· DOI: https://doi.org/10.1109/lra.2020.3008120
· OA: W3037969311
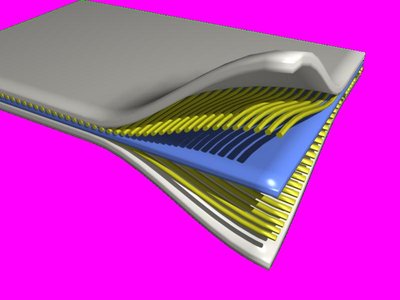
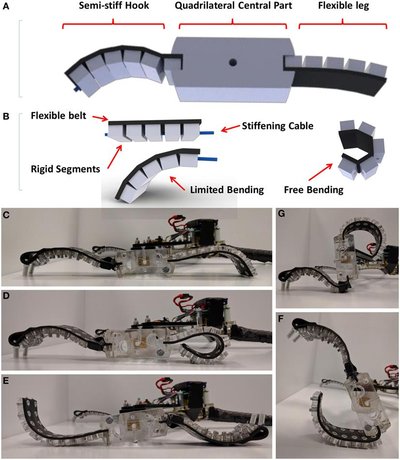
In this letter, we address the challenge of sensor fusion in Soft Robotics for estimating forces and deformations. In the context of intrinsic sensing, we propose the use of soft capacitive sensing to find a contact's location, and the use of pneumatic sensing to estimate the force intensity and the deformation. Using a FEM-based numerical approach, we integrate both sensing streams and model two Soft Robotics devices we have conceived. These devices are a Soft Pad and a Soft Finger. We show in an evaluation that external forces on the Soft Pad can be estimated and that the shape of the Soft Finger can be reconstructed.
Related Topics































Finding more related topics…