AVOIDANCE TRAJECTORIES FOR DRIVER ASSISTANCE SYSTEMS VIA SOLVERS FOR OPTIMAL CONTROL PROBLEMS∗ Article Swipe
 YOU?
·
· 2015
· Open Access
·
YOU?
·
· 2015
· Open Access
·
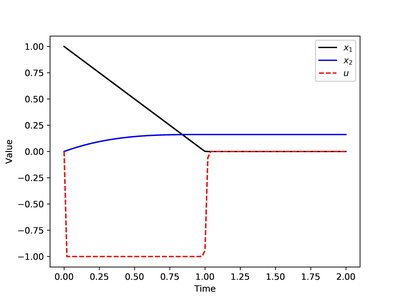
Avoidance trajectories for driver assistance systems is an important and active field of research in car industry. Assistance systems with active braking maneuvers rely on car models, e.g. the single-track model, which are modeled as control problems. The formulation of suitable objective functions serves as a tool to realize collision detection and avoidance. In two scenarios for overtaking maneuvers, an optimal trajectory is computed via fixing a secure target state or by computing reachable sets from the initial starting point. First numerical experiments show approximations to optimal trajectories, controls and reachable sets. The sensitivity analysis in both, the optimal trajectory and the reachable set, reveal parameters that significantly influence the solution. Key words. sensitivity analysis; direct discretization methods; optimal control; reachable sets AMS subject classifications. 90C31, 49K40, 49M37
Related Topics













- Type
- preprint
- Language
- en
- OA Status
- green
- Cited By
- 7
- Related Works
- 10
- OpenAlex ID
- https://openalex.org/W2288431212
Raw OpenAlex JSON
- OpenAlex ID
-
https://openalex.org/W2288431212Canonical identifier for this work in OpenAlex
- Title
-
AVOIDANCE TRAJECTORIES FOR DRIVER ASSISTANCE SYSTEMS VIA SOLVERS FOR OPTIMAL CONTROL PROBLEMS∗Work title
- Type
-
preprintOpenAlex work type
- Language
-
enPrimary language
- Publication year
-
2015Year of publication
- Publication date
-
2015-07-02Full publication date if available
- Authors
-
Ilaria Xausa, Robert Baier, Matthias Gerdts, Mark Gonter, Christian WegwerthList of authors in order
- Open access
-
YesWhether a free full text is available
- OA status
-
greenOpen access status per OpenAlex
- OA URL
-
https://inria.hal.science/hal-00712878Direct OA link when available
- Concepts
-
Overtaking, Trajectory, Collision avoidance, Computer science, Control theory (sociology), Set (abstract data type), Optimal control, Sensitivity (control systems), Point (geometry), Vehicle dynamics, Control (management), Model predictive control, Advanced driver assistance systems, Collision, Mathematical optimization, Engineering, Mathematics, Artificial intelligence, Automotive engineering, Physics, Geometry, Computer security, Civil engineering, Programming language, Astronomy, Electronic engineeringTop concepts (fields/topics) attached by OpenAlex
- Cited by
-
7Total citation count in OpenAlex
- Citations by year (recent)
-
2020: 1, 2019: 1, 2017: 1, 2016: 3, 2015: 1Per-year citation counts (last 5 years)
- Related works (count)
-
10Other works algorithmically related by OpenAlex
Full payload
| id | https://openalex.org/W2288431212 |
|---|---|
| doi | |
| ids.mag | 2288431212 |
| ids.openalex | https://openalex.org/W2288431212 |
| fwci | 1.49143401 |
| type | preprint |
| title | AVOIDANCE TRAJECTORIES FOR DRIVER ASSISTANCE SYSTEMS VIA SOLVERS FOR OPTIMAL CONTROL PROBLEMS∗ |
| biblio.issue | |
| biblio.volume | |
| biblio.last_page | |
| biblio.first_page | |
| topics[0].id | https://openalex.org/T10805 |
| topics[0].field.id | https://openalex.org/fields/22 |
| topics[0].field.display_name | Engineering |
| topics[0].score | 0.9987999796867371 |
| topics[0].domain.id | https://openalex.org/domains/3 |
| topics[0].domain.display_name | Physical Sciences |
| topics[0].subfield.id | https://openalex.org/subfields/2203 |
| topics[0].subfield.display_name | Automotive Engineering |
| topics[0].display_name | Vehicle Dynamics and Control Systems |
| topics[1].id | https://openalex.org/T10524 |
| topics[1].field.id | https://openalex.org/fields/22 |
| topics[1].field.display_name | Engineering |
| topics[1].score | 0.9980000257492065 |
| topics[1].domain.id | https://openalex.org/domains/3 |
| topics[1].domain.display_name | Physical Sciences |
| topics[1].subfield.id | https://openalex.org/subfields/2207 |
| topics[1].subfield.display_name | Control and Systems Engineering |
| topics[1].display_name | Traffic control and management |
| topics[2].id | https://openalex.org/T11099 |
| topics[2].field.id | https://openalex.org/fields/22 |
| topics[2].field.display_name | Engineering |
| topics[2].score | 0.9908000230789185 |
| topics[2].domain.id | https://openalex.org/domains/3 |
| topics[2].domain.display_name | Physical Sciences |
| topics[2].subfield.id | https://openalex.org/subfields/2203 |
| topics[2].subfield.display_name | Automotive Engineering |
| topics[2].display_name | Autonomous Vehicle Technology and Safety |
| is_xpac | False |
| apc_list | |
| apc_paid | |
| concepts[0].id | https://openalex.org/C2778448659 |
| concepts[0].level | 2 |
| concepts[0].score | 0.9062855243682861 |
| concepts[0].wikidata | https://www.wikidata.org/wiki/Q1931051 |
| concepts[0].display_name | Overtaking |
| concepts[1].id | https://openalex.org/C13662910 |
| concepts[1].level | 2 |
| concepts[1].score | 0.7925914525985718 |
| concepts[1].wikidata | https://www.wikidata.org/wiki/Q193139 |
| concepts[1].display_name | Trajectory |
| concepts[2].id | https://openalex.org/C2780864053 |
| concepts[2].level | 3 |
| concepts[2].score | 0.7665045261383057 |
| concepts[2].wikidata | https://www.wikidata.org/wiki/Q5147495 |
| concepts[2].display_name | Collision avoidance |
| concepts[3].id | https://openalex.org/C41008148 |
| concepts[3].level | 0 |
| concepts[3].score | 0.6522965431213379 |
| concepts[3].wikidata | https://www.wikidata.org/wiki/Q21198 |
| concepts[3].display_name | Computer science |
| concepts[4].id | https://openalex.org/C47446073 |
| concepts[4].level | 3 |
| concepts[4].score | 0.5861915946006775 |
| concepts[4].wikidata | https://www.wikidata.org/wiki/Q5165890 |
| concepts[4].display_name | Control theory (sociology) |
| concepts[5].id | https://openalex.org/C177264268 |
| concepts[5].level | 2 |
| concepts[5].score | 0.5825035572052002 |
| concepts[5].wikidata | https://www.wikidata.org/wiki/Q1514741 |
| concepts[5].display_name | Set (abstract data type) |
| concepts[6].id | https://openalex.org/C91575142 |
| concepts[6].level | 2 |
| concepts[6].score | 0.5753929615020752 |
| concepts[6].wikidata | https://www.wikidata.org/wiki/Q1971426 |
| concepts[6].display_name | Optimal control |
| concepts[7].id | https://openalex.org/C21200559 |
| concepts[7].level | 2 |
| concepts[7].score | 0.487193763256073 |
| concepts[7].wikidata | https://www.wikidata.org/wiki/Q7451068 |
| concepts[7].display_name | Sensitivity (control systems) |
| concepts[8].id | https://openalex.org/C28719098 |
| concepts[8].level | 2 |
| concepts[8].score | 0.46352890133857727 |
| concepts[8].wikidata | https://www.wikidata.org/wiki/Q44946 |
| concepts[8].display_name | Point (geometry) |
| concepts[9].id | https://openalex.org/C79487989 |
| concepts[9].level | 2 |
| concepts[9].score | 0.46283483505249023 |
| concepts[9].wikidata | https://www.wikidata.org/wiki/Q934680 |
| concepts[9].display_name | Vehicle dynamics |
| concepts[10].id | https://openalex.org/C2775924081 |
| concepts[10].level | 2 |
| concepts[10].score | 0.4338001608848572 |
| concepts[10].wikidata | https://www.wikidata.org/wiki/Q55608371 |
| concepts[10].display_name | Control (management) |
| concepts[11].id | https://openalex.org/C172205157 |
| concepts[11].level | 3 |
| concepts[11].score | 0.43294936418533325 |
| concepts[11].wikidata | https://www.wikidata.org/wiki/Q1782962 |
| concepts[11].display_name | Model predictive control |
| concepts[12].id | https://openalex.org/C87833898 |
| concepts[12].level | 2 |
| concepts[12].score | 0.41345012187957764 |
| concepts[12].wikidata | https://www.wikidata.org/wiki/Q1060280 |
| concepts[12].display_name | Advanced driver assistance systems |
| concepts[13].id | https://openalex.org/C121704057 |
| concepts[13].level | 2 |
| concepts[13].score | 0.3567431569099426 |
| concepts[13].wikidata | https://www.wikidata.org/wiki/Q352070 |
| concepts[13].display_name | Collision |
| concepts[14].id | https://openalex.org/C126255220 |
| concepts[14].level | 1 |
| concepts[14].score | 0.341185599565506 |
| concepts[14].wikidata | https://www.wikidata.org/wiki/Q141495 |
| concepts[14].display_name | Mathematical optimization |
| concepts[15].id | https://openalex.org/C127413603 |
| concepts[15].level | 0 |
| concepts[15].score | 0.1882244348526001 |
| concepts[15].wikidata | https://www.wikidata.org/wiki/Q11023 |
| concepts[15].display_name | Engineering |
| concepts[16].id | https://openalex.org/C33923547 |
| concepts[16].level | 0 |
| concepts[16].score | 0.18077117204666138 |
| concepts[16].wikidata | https://www.wikidata.org/wiki/Q395 |
| concepts[16].display_name | Mathematics |
| concepts[17].id | https://openalex.org/C154945302 |
| concepts[17].level | 1 |
| concepts[17].score | 0.11929178237915039 |
| concepts[17].wikidata | https://www.wikidata.org/wiki/Q11660 |
| concepts[17].display_name | Artificial intelligence |
| concepts[18].id | https://openalex.org/C171146098 |
| concepts[18].level | 1 |
| concepts[18].score | 0.0770902931690216 |
| concepts[18].wikidata | https://www.wikidata.org/wiki/Q124192 |
| concepts[18].display_name | Automotive engineering |
| concepts[19].id | https://openalex.org/C121332964 |
| concepts[19].level | 0 |
| concepts[19].score | 0.0 |
| concepts[19].wikidata | https://www.wikidata.org/wiki/Q413 |
| concepts[19].display_name | Physics |
| concepts[20].id | https://openalex.org/C2524010 |
| concepts[20].level | 1 |
| concepts[20].score | 0.0 |
| concepts[20].wikidata | https://www.wikidata.org/wiki/Q8087 |
| concepts[20].display_name | Geometry |
| concepts[21].id | https://openalex.org/C38652104 |
| concepts[21].level | 1 |
| concepts[21].score | 0.0 |
| concepts[21].wikidata | https://www.wikidata.org/wiki/Q3510521 |
| concepts[21].display_name | Computer security |
| concepts[22].id | https://openalex.org/C147176958 |
| concepts[22].level | 1 |
| concepts[22].score | 0.0 |
| concepts[22].wikidata | https://www.wikidata.org/wiki/Q77590 |
| concepts[22].display_name | Civil engineering |
| concepts[23].id | https://openalex.org/C199360897 |
| concepts[23].level | 1 |
| concepts[23].score | 0.0 |
| concepts[23].wikidata | https://www.wikidata.org/wiki/Q9143 |
| concepts[23].display_name | Programming language |
| concepts[24].id | https://openalex.org/C1276947 |
| concepts[24].level | 1 |
| concepts[24].score | 0.0 |
| concepts[24].wikidata | https://www.wikidata.org/wiki/Q333 |
| concepts[24].display_name | Astronomy |
| concepts[25].id | https://openalex.org/C24326235 |
| concepts[25].level | 1 |
| concepts[25].score | 0.0 |
| concepts[25].wikidata | https://www.wikidata.org/wiki/Q126095 |
| concepts[25].display_name | Electronic engineering |
| keywords[0].id | https://openalex.org/keywords/overtaking |
| keywords[0].score | 0.9062855243682861 |
| keywords[0].display_name | Overtaking |
| keywords[1].id | https://openalex.org/keywords/trajectory |
| keywords[1].score | 0.7925914525985718 |
| keywords[1].display_name | Trajectory |
| keywords[2].id | https://openalex.org/keywords/collision-avoidance |
| keywords[2].score | 0.7665045261383057 |
| keywords[2].display_name | Collision avoidance |
| keywords[3].id | https://openalex.org/keywords/computer-science |
| keywords[3].score | 0.6522965431213379 |
| keywords[3].display_name | Computer science |
| keywords[4].id | https://openalex.org/keywords/control-theory |
| keywords[4].score | 0.5861915946006775 |
| keywords[4].display_name | Control theory (sociology) |
| keywords[5].id | https://openalex.org/keywords/set |
| keywords[5].score | 0.5825035572052002 |
| keywords[5].display_name | Set (abstract data type) |
| keywords[6].id | https://openalex.org/keywords/optimal-control |
| keywords[6].score | 0.5753929615020752 |
| keywords[6].display_name | Optimal control |
| keywords[7].id | https://openalex.org/keywords/sensitivity |
| keywords[7].score | 0.487193763256073 |
| keywords[7].display_name | Sensitivity (control systems) |
| keywords[8].id | https://openalex.org/keywords/point |
| keywords[8].score | 0.46352890133857727 |
| keywords[8].display_name | Point (geometry) |
| keywords[9].id | https://openalex.org/keywords/vehicle-dynamics |
| keywords[9].score | 0.46283483505249023 |
| keywords[9].display_name | Vehicle dynamics |
| keywords[10].id | https://openalex.org/keywords/control |
| keywords[10].score | 0.4338001608848572 |
| keywords[10].display_name | Control (management) |
| keywords[11].id | https://openalex.org/keywords/model-predictive-control |
| keywords[11].score | 0.43294936418533325 |
| keywords[11].display_name | Model predictive control |
| keywords[12].id | https://openalex.org/keywords/advanced-driver-assistance-systems |
| keywords[12].score | 0.41345012187957764 |
| keywords[12].display_name | Advanced driver assistance systems |
| keywords[13].id | https://openalex.org/keywords/collision |
| keywords[13].score | 0.3567431569099426 |
| keywords[13].display_name | Collision |
| keywords[14].id | https://openalex.org/keywords/mathematical-optimization |
| keywords[14].score | 0.341185599565506 |
| keywords[14].display_name | Mathematical optimization |
| keywords[15].id | https://openalex.org/keywords/engineering |
| keywords[15].score | 0.1882244348526001 |
| keywords[15].display_name | Engineering |
| keywords[16].id | https://openalex.org/keywords/mathematics |
| keywords[16].score | 0.18077117204666138 |
| keywords[16].display_name | Mathematics |
| keywords[17].id | https://openalex.org/keywords/artificial-intelligence |
| keywords[17].score | 0.11929178237915039 |
| keywords[17].display_name | Artificial intelligence |
| keywords[18].id | https://openalex.org/keywords/automotive-engineering |
| keywords[18].score | 0.0770902931690216 |
| keywords[18].display_name | Automotive engineering |
| language | en |
| locations[0].id | pmh:oai:eref.uni-bayreuth.de:9912 |
| locations[0].is_oa | False |
| locations[0].source | |
| locations[0].license | |
| locations[0].pdf_url | |
| locations[0].version | acceptedVersion |
| locations[0].raw_type | Aufsatz in einem Buch |
| locations[0].license_id | |
| locations[0].is_accepted | True |
| locations[0].is_published | False |
| locations[0].raw_source_name | |
| locations[0].landing_page_url | |
| locations[1].id | pmh:oai:CiteSeerX.psu:10.1.1.593.7217 |
| locations[1].is_oa | False |
| locations[1].source | |
| locations[1].license | |
| locations[1].pdf_url | |
| locations[1].version | submittedVersion |
| locations[1].raw_type | text |
| locations[1].license_id | |
| locations[1].is_accepted | False |
| locations[1].is_published | False |
| locations[1].raw_source_name | http://hal.inria.fr/docs/00/71/28/78/PDF/mtnsxausa2012.pdf |
| locations[1].landing_page_url | http://citeseerx.ist.psu.edu/viewdoc/summary?doi=10.1.1.593.7217 |
| locations[2].id | pmh:oai:HAL:hal-00712878v1 |
| locations[2].is_oa | True |
| locations[2].source.id | https://openalex.org/S4306402512 |
| locations[2].source.issn | |
| locations[2].source.type | repository |
| locations[2].source.is_oa | False |
| locations[2].source.issn_l | |
| locations[2].source.is_core | False |
| locations[2].source.is_in_doaj | False |
| locations[2].source.display_name | HAL (Le Centre pour la Communication Scientifique Directe) |
| locations[2].source.host_organization | https://openalex.org/I1294671590 |
| locations[2].source.host_organization_name | Centre National de la Recherche Scientifique |
| locations[2].source.host_organization_lineage | https://openalex.org/I1294671590 |
| locations[2].license | other-oa |
| locations[2].pdf_url | |
| locations[2].version | submittedVersion |
| locations[2].raw_type | info:eu-repo/semantics/conferenceObject |
| locations[2].license_id | https://openalex.org/licenses/other-oa |
| locations[2].is_accepted | False |
| locations[2].is_published | False |
| locations[2].raw_source_name | 20th International Symposium on Mathematical Theory of Networks and Systems |
| locations[2].landing_page_url | https://inria.hal.science/hal-00712878 |
| authorships[0].author.id | https://openalex.org/A5008255195 |
| authorships[0].author.orcid | |
| authorships[0].author.display_name | Ilaria Xausa |
| authorships[0].affiliations[0].raw_affiliation_string | Institut für Mathematik und Rechneranwendung [Munchen] |
| authorships[0].author_position | first |
| authorships[0].raw_author_name | Ilaria Xausa |
| authorships[0].is_corresponding | False |
| authorships[0].raw_affiliation_strings | Institut für Mathematik und Rechneranwendung [Munchen] |
| authorships[1].author.id | https://openalex.org/A5037003187 |
| authorships[1].author.orcid | https://orcid.org/0000-0002-2531-0182 |
| authorships[1].author.display_name | Robert Baier |
| authorships[1].affiliations[0].raw_affiliation_string | Mathematisches Institut [Bayreuth] |
| authorships[1].author_position | middle |
| authorships[1].raw_author_name | Robert Baier |
| authorships[1].is_corresponding | False |
| authorships[1].raw_affiliation_strings | Mathematisches Institut [Bayreuth] |
| authorships[2].author.id | https://openalex.org/A5011281312 |
| authorships[2].author.orcid | https://orcid.org/0000-0001-8674-5764 |
| authorships[2].author.display_name | Matthias Gerdts |
| authorships[2].affiliations[0].raw_affiliation_string | Institut für Mathematik und Rechneranwendung [Munchen] |
| authorships[2].author_position | middle |
| authorships[2].raw_author_name | Matthias Gerdts |
| authorships[2].is_corresponding | False |
| authorships[2].raw_affiliation_strings | Institut für Mathematik und Rechneranwendung [Munchen] |
| authorships[3].author.id | https://openalex.org/A5038529651 |
| authorships[3].author.orcid | |
| authorships[3].author.display_name | Mark Gonter |
| authorships[3].affiliations[0].raw_affiliation_string | Group Research: Integrated Safety and Light |
| authorships[3].author_position | middle |
| authorships[3].raw_author_name | Mark Gonter |
| authorships[3].is_corresponding | False |
| authorships[3].raw_affiliation_strings | Group Research: Integrated Safety and Light |
| authorships[4].author.id | https://openalex.org/A5000363406 |
| authorships[4].author.orcid | |
| authorships[4].author.display_name | Christian Wegwerth |
| authorships[4].affiliations[0].raw_affiliation_string | Group Research: Integrated Safety and Light |
| authorships[4].author_position | last |
| authorships[4].raw_author_name | Christian Wegwerth |
| authorships[4].is_corresponding | False |
| authorships[4].raw_affiliation_strings | Group Research: Integrated Safety and Light |
| has_content.pdf | False |
| has_content.grobid_xml | False |
| is_paratext | False |
| open_access.is_oa | True |
| open_access.oa_url | https://inria.hal.science/hal-00712878 |
| open_access.oa_status | green |
| open_access.any_repository_has_fulltext | False |
| created_date | 2025-10-10T00:00:00 |
| display_name | AVOIDANCE TRAJECTORIES FOR DRIVER ASSISTANCE SYSTEMS VIA SOLVERS FOR OPTIMAL CONTROL PROBLEMS∗ |
| has_fulltext | False |
| is_retracted | False |
| updated_date | 2025-11-06T04:12:42.849631 |
| primary_topic.id | https://openalex.org/T10805 |
| primary_topic.field.id | https://openalex.org/fields/22 |
| primary_topic.field.display_name | Engineering |
| primary_topic.score | 0.9987999796867371 |
| primary_topic.domain.id | https://openalex.org/domains/3 |
| primary_topic.domain.display_name | Physical Sciences |
| primary_topic.subfield.id | https://openalex.org/subfields/2203 |
| primary_topic.subfield.display_name | Automotive Engineering |
| primary_topic.display_name | Vehicle Dynamics and Control Systems |
| related_works | https://openalex.org/W2922689720, https://openalex.org/W2155627186, https://openalex.org/W3003963711, https://openalex.org/W3190651425, https://openalex.org/W1906954934, https://openalex.org/W128654086, https://openalex.org/W2255861468, https://openalex.org/W2120267624, https://openalex.org/W2063933439, https://openalex.org/W2122242013 |
| cited_by_count | 7 |
| counts_by_year[0].year | 2020 |
| counts_by_year[0].cited_by_count | 1 |
| counts_by_year[1].year | 2019 |
| counts_by_year[1].cited_by_count | 1 |
| counts_by_year[2].year | 2017 |
| counts_by_year[2].cited_by_count | 1 |
| counts_by_year[3].year | 2016 |
| counts_by_year[3].cited_by_count | 3 |
| counts_by_year[4].year | 2015 |
| counts_by_year[4].cited_by_count | 1 |
| locations_count | 3 |
| best_oa_location.id | pmh:oai:HAL:hal-00712878v1 |
| best_oa_location.is_oa | True |
| best_oa_location.source.id | https://openalex.org/S4306402512 |
| best_oa_location.source.issn | |
| best_oa_location.source.type | repository |
| best_oa_location.source.is_oa | False |
| best_oa_location.source.issn_l | |
| best_oa_location.source.is_core | False |
| best_oa_location.source.is_in_doaj | False |
| best_oa_location.source.display_name | HAL (Le Centre pour la Communication Scientifique Directe) |
| best_oa_location.source.host_organization | https://openalex.org/I1294671590 |
| best_oa_location.source.host_organization_name | Centre National de la Recherche Scientifique |
| best_oa_location.source.host_organization_lineage | https://openalex.org/I1294671590 |
| best_oa_location.license | other-oa |
| best_oa_location.pdf_url | |
| best_oa_location.version | submittedVersion |
| best_oa_location.raw_type | info:eu-repo/semantics/conferenceObject |
| best_oa_location.license_id | https://openalex.org/licenses/other-oa |
| best_oa_location.is_accepted | False |
| best_oa_location.is_published | False |
| best_oa_location.raw_source_name | 20th International Symposium on Mathematical Theory of Networks and Systems |
| best_oa_location.landing_page_url | https://inria.hal.science/hal-00712878 |
| primary_location.id | pmh:oai:eref.uni-bayreuth.de:9912 |
| primary_location.is_oa | False |
| primary_location.source | |
| primary_location.license | |
| primary_location.pdf_url | |
| primary_location.version | acceptedVersion |
| primary_location.raw_type | Aufsatz in einem Buch |
| primary_location.license_id | |
| primary_location.is_accepted | True |
| primary_location.is_published | False |
| primary_location.raw_source_name | |
| primary_location.landing_page_url | |
| publication_date | 2015-07-02 |
| publication_year | 2015 |
| referenced_works_count | 0 |
| abstract_inverted_index.a | 46, 67 |
| abstract_inverted_index.In | 54 |
| abstract_inverted_index.an | 8, 60 |
| abstract_inverted_index.as | 35, 45 |
| abstract_inverted_index.by | 72 |
| abstract_inverted_index.in | 15, 96 |
| abstract_inverted_index.is | 7, 63 |
| abstract_inverted_index.of | 13, 40 |
| abstract_inverted_index.on | 25 |
| abstract_inverted_index.or | 71 |
| abstract_inverted_index.to | 48, 86 |
| abstract_inverted_index.AMS | 123 |
| abstract_inverted_index.Key | 112 |
| abstract_inverted_index.The | 38, 93 |
| abstract_inverted_index.and | 10, 52, 90, 101 |
| abstract_inverted_index.are | 33 |
| abstract_inverted_index.car | 16, 26 |
| abstract_inverted_index.for | 3, 57 |
| abstract_inverted_index.the | 29, 77, 98, 102, 110 |
| abstract_inverted_index.two | 55 |
| abstract_inverted_index.via | 65 |
| abstract_inverted_index.e.g. | 28 |
| abstract_inverted_index.from | 76 |
| abstract_inverted_index.rely | 24 |
| abstract_inverted_index.set, | 104 |
| abstract_inverted_index.sets | 75, 122 |
| abstract_inverted_index.show | 84 |
| abstract_inverted_index.that | 107 |
| abstract_inverted_index.tool | 47 |
| abstract_inverted_index.with | 20 |
| abstract_inverted_index.49M37 | 128 |
| abstract_inverted_index.First | 81 |
| abstract_inverted_index.both, | 97 |
| abstract_inverted_index.field | 12 |
| abstract_inverted_index.sets. | 92 |
| abstract_inverted_index.state | 70 |
| abstract_inverted_index.which | 32 |
| abstract_inverted_index.49K40, | 127 |
| abstract_inverted_index.90C31, | 126 |
| abstract_inverted_index.active | 11, 21 |
| abstract_inverted_index.direct | 116 |
| abstract_inverted_index.driver | 4 |
| abstract_inverted_index.fixing | 66 |
| abstract_inverted_index.model, | 31 |
| abstract_inverted_index.point. | 80 |
| abstract_inverted_index.reveal | 105 |
| abstract_inverted_index.secure | 68 |
| abstract_inverted_index.serves | 44 |
| abstract_inverted_index.target | 69 |
| abstract_inverted_index.words. | 113 |
| abstract_inverted_index.braking | 22 |
| abstract_inverted_index.control | 36 |
| abstract_inverted_index.initial | 78 |
| abstract_inverted_index.modeled | 34 |
| abstract_inverted_index.models, | 27 |
| abstract_inverted_index.optimal | 61, 87, 99, 119 |
| abstract_inverted_index.realize | 49 |
| abstract_inverted_index.subject | 124 |
| abstract_inverted_index.systems | 6, 19 |
| abstract_inverted_index.analysis | 95 |
| abstract_inverted_index.computed | 64 |
| abstract_inverted_index.control; | 120 |
| abstract_inverted_index.controls | 89 |
| abstract_inverted_index.methods; | 118 |
| abstract_inverted_index.research | 14 |
| abstract_inverted_index.starting | 79 |
| abstract_inverted_index.suitable | 41 |
| abstract_inverted_index.Abstract. | 0 |
| abstract_inverted_index.Avoidance | 1 |
| abstract_inverted_index.analysis; | 115 |
| abstract_inverted_index.collision | 50 |
| abstract_inverted_index.computing | 73 |
| abstract_inverted_index.detection | 51 |
| abstract_inverted_index.functions | 43 |
| abstract_inverted_index.important | 9 |
| abstract_inverted_index.industry. | 17 |
| abstract_inverted_index.influence | 109 |
| abstract_inverted_index.maneuvers | 23 |
| abstract_inverted_index.numerical | 82 |
| abstract_inverted_index.objective | 42 |
| abstract_inverted_index.problems. | 37 |
| abstract_inverted_index.reachable | 74, 91, 103, 121 |
| abstract_inverted_index.scenarios | 56 |
| abstract_inverted_index.solution. | 111 |
| abstract_inverted_index.Assistance | 18 |
| abstract_inverted_index.assistance | 5 |
| abstract_inverted_index.avoidance. | 53 |
| abstract_inverted_index.maneuvers, | 59 |
| abstract_inverted_index.overtaking | 58 |
| abstract_inverted_index.parameters | 106 |
| abstract_inverted_index.trajectory | 62, 100 |
| abstract_inverted_index.experiments | 83 |
| abstract_inverted_index.formulation | 39 |
| abstract_inverted_index.sensitivity | 94, 114 |
| abstract_inverted_index.single-track | 30 |
| abstract_inverted_index.trajectories | 2 |
| abstract_inverted_index.significantly | 108 |
| abstract_inverted_index.trajectories, | 88 |
| abstract_inverted_index.approximations | 85 |
| abstract_inverted_index.discretization | 117 |
| abstract_inverted_index.classifications. | 125 |
| cited_by_percentile_year.max | 97 |
| cited_by_percentile_year.min | 89 |
| countries_distinct_count | 0 |
| institutions_distinct_count | 5 |
| sustainable_development_goals[0].id | https://metadata.un.org/sdg/9 |
| sustainable_development_goals[0].score | 0.5 |
| sustainable_development_goals[0].display_name | Industry, innovation and infrastructure |
| citation_normalized_percentile.value | 0.86053684 |
| citation_normalized_percentile.is_in_top_1_percent | False |
| citation_normalized_percentile.is_in_top_10_percent | False |