Pedestrian motion centroid model based on robot dynamics Article Swipe
 YOU?
·
· 2022
· Open Access
·
· DOI: https://doi.org/10.1051/matecconf/202235503016
YOU?
·
· 2022
· Open Access
·
· DOI: https://doi.org/10.1051/matecconf/202235503016
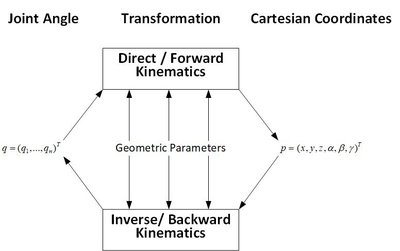
In recent years, with the rapid development of computer vision technology, image-based human body research has become an important task, such as pedestrian target detection, trajectory tracking, posture estimation and behaviour recognition. The centre of mass is one of the important characteristics that can reflect the phenomenon of pedestrian movement. This paper first introduces the biped robot model in robotics, starting from forward and inverse kinematics, to find the mapping relationship between the position of each joint and the pose of the end effector. Then, corresponding to the skeleton model of the human joint points, the characteristics of the bone posture and joint angle are determined. The moment of inertia factor is introduced, and the motion superposition of different joint points is considered to establish a pedestrian motion centroid model. By calculating the equivalent dynamic centroid, the pedestrian kinematics law can be explored and the pedestrian movement mechanism can be more deeply recognized.
Related Topics

















- Type
- article
- Language
- en
- Landing Page
- https://doi.org/10.1051/matecconf/202235503016
- https://www.matec-conferences.org/articles/matecconf/pdf/2022/02/matecconf_icpcm2022_03016.pdf
- OA Status
- diamond
- References
- 6
- Related Works
- 10
- OpenAlex ID
- https://openalex.org/W4206218373
Raw OpenAlex JSON
- OpenAlex ID
-
https://openalex.org/W4206218373Canonical identifier for this work in OpenAlex
- DOI
-
https://doi.org/10.1051/matecconf/202235503016Digital Object Identifier
- Title
-
Pedestrian motion centroid model based on robot dynamicsWork title
- Type
-
articleOpenAlex work type
- Language
-
enPrimary language
- Publication year
-
2022Year of publication
- Publication date
-
2022-01-01Full publication date if available
- Authors
-
Rongyong Zhao, Yan Wang, Chuanfeng Han, Ping Jia, Cuiling Li, Wenjie ZhuList of authors in order
- Landing page
-
https://doi.org/10.1051/matecconf/202235503016Publisher landing page
- PDF URL
-
https://www.matec-conferences.org/articles/matecconf/pdf/2022/02/matecconf_icpcm2022_03016.pdfDirect link to full text PDF
- Open access
-
YesWhether a free full text is available
- OA status
-
diamondOpen access status per OpenAlex
- OA URL
-
https://www.matec-conferences.org/articles/matecconf/pdf/2022/02/matecconf_icpcm2022_03016.pdfDirect OA link when available
- Concepts
-
Centroid, Artificial intelligence, Computer vision, Kinematics, Computer science, Pedestrian, Trajectory, Inverse kinematics, Motion (physics), Position (finance), Inverse dynamics, Robotics, Joint (building), Robot, Engineering, Physics, Transport engineering, Architectural engineering, Economics, Finance, Classical mechanics, AstronomyTop concepts (fields/topics) attached by OpenAlex
- Cited by
-
0Total citation count in OpenAlex
- References (count)
-
6Number of works referenced by this work
- Related works (count)
-
10Other works algorithmically related by OpenAlex
Full payload
| id | https://openalex.org/W4206218373 |
|---|---|
| doi | https://doi.org/10.1051/matecconf/202235503016 |
| ids.doi | https://doi.org/10.1051/matecconf/202235503016 |
| ids.openalex | https://openalex.org/W4206218373 |
| fwci | 0.0 |
| type | article |
| title | Pedestrian motion centroid model based on robot dynamics |
| biblio.issue | |
| biblio.volume | 355 |
| biblio.last_page | 03016 |
| biblio.first_page | 03016 |
| topics[0].id | https://openalex.org/T12740 |
| topics[0].field.id | https://openalex.org/fields/22 |
| topics[0].field.display_name | Engineering |
| topics[0].score | 0.996999979019165 |
| topics[0].domain.id | https://openalex.org/domains/3 |
| topics[0].domain.display_name | Physical Sciences |
| topics[0].subfield.id | https://openalex.org/subfields/2204 |
| topics[0].subfield.display_name | Biomedical Engineering |
| topics[0].display_name | Gait Recognition and Analysis |
| topics[1].id | https://openalex.org/T10879 |
| topics[1].field.id | https://openalex.org/fields/22 |
| topics[1].field.display_name | Engineering |
| topics[1].score | 0.991599977016449 |
| topics[1].domain.id | https://openalex.org/domains/3 |
| topics[1].domain.display_name | Physical Sciences |
| topics[1].subfield.id | https://openalex.org/subfields/2204 |
| topics[1].subfield.display_name | Biomedical Engineering |
| topics[1].display_name | Robotic Locomotion and Control |
| topics[2].id | https://openalex.org/T11500 |
| topics[2].field.id | https://openalex.org/fields/22 |
| topics[2].field.display_name | Engineering |
| topics[2].score | 0.9883999824523926 |
| topics[2].domain.id | https://openalex.org/domains/3 |
| topics[2].domain.display_name | Physical Sciences |
| topics[2].subfield.id | https://openalex.org/subfields/2212 |
| topics[2].subfield.display_name | Ocean Engineering |
| topics[2].display_name | Evacuation and Crowd Dynamics |
| is_xpac | False |
| apc_list | |
| apc_paid | |
| concepts[0].id | https://openalex.org/C146599234 |
| concepts[0].level | 2 |
| concepts[0].score | 0.7610754370689392 |
| concepts[0].wikidata | https://www.wikidata.org/wiki/Q511093 |
| concepts[0].display_name | Centroid |
| concepts[1].id | https://openalex.org/C154945302 |
| concepts[1].level | 1 |
| concepts[1].score | 0.7118788361549377 |
| concepts[1].wikidata | https://www.wikidata.org/wiki/Q11660 |
| concepts[1].display_name | Artificial intelligence |
| concepts[2].id | https://openalex.org/C31972630 |
| concepts[2].level | 1 |
| concepts[2].score | 0.6977213621139526 |
| concepts[2].wikidata | https://www.wikidata.org/wiki/Q844240 |
| concepts[2].display_name | Computer vision |
| concepts[3].id | https://openalex.org/C39920418 |
| concepts[3].level | 2 |
| concepts[3].score | 0.6804501414299011 |
| concepts[3].wikidata | https://www.wikidata.org/wiki/Q11476 |
| concepts[3].display_name | Kinematics |
| concepts[4].id | https://openalex.org/C41008148 |
| concepts[4].level | 0 |
| concepts[4].score | 0.5950725674629211 |
| concepts[4].wikidata | https://www.wikidata.org/wiki/Q21198 |
| concepts[4].display_name | Computer science |
| concepts[5].id | https://openalex.org/C2777113093 |
| concepts[5].level | 2 |
| concepts[5].score | 0.5796813368797302 |
| concepts[5].wikidata | https://www.wikidata.org/wiki/Q221488 |
| concepts[5].display_name | Pedestrian |
| concepts[6].id | https://openalex.org/C13662910 |
| concepts[6].level | 2 |
| concepts[6].score | 0.5104321837425232 |
| concepts[6].wikidata | https://www.wikidata.org/wiki/Q193139 |
| concepts[6].display_name | Trajectory |
| concepts[7].id | https://openalex.org/C17816587 |
| concepts[7].level | 3 |
| concepts[7].score | 0.501708984375 |
| concepts[7].wikidata | https://www.wikidata.org/wiki/Q1501872 |
| concepts[7].display_name | Inverse kinematics |
| concepts[8].id | https://openalex.org/C104114177 |
| concepts[8].level | 2 |
| concepts[8].score | 0.49581989645957947 |
| concepts[8].wikidata | https://www.wikidata.org/wiki/Q79782 |
| concepts[8].display_name | Motion (physics) |
| concepts[9].id | https://openalex.org/C198082294 |
| concepts[9].level | 2 |
| concepts[9].score | 0.4582192003726959 |
| concepts[9].wikidata | https://www.wikidata.org/wiki/Q3399648 |
| concepts[9].display_name | Position (finance) |
| concepts[10].id | https://openalex.org/C187523126 |
| concepts[10].level | 3 |
| concepts[10].score | 0.43809768557548523 |
| concepts[10].wikidata | https://www.wikidata.org/wiki/Q17098330 |
| concepts[10].display_name | Inverse dynamics |
| concepts[11].id | https://openalex.org/C34413123 |
| concepts[11].level | 3 |
| concepts[11].score | 0.4278143048286438 |
| concepts[11].wikidata | https://www.wikidata.org/wiki/Q170978 |
| concepts[11].display_name | Robotics |
| concepts[12].id | https://openalex.org/C18555067 |
| concepts[12].level | 2 |
| concepts[12].score | 0.413821816444397 |
| concepts[12].wikidata | https://www.wikidata.org/wiki/Q8375051 |
| concepts[12].display_name | Joint (building) |
| concepts[13].id | https://openalex.org/C90509273 |
| concepts[13].level | 2 |
| concepts[13].score | 0.36580729484558105 |
| concepts[13].wikidata | https://www.wikidata.org/wiki/Q11012 |
| concepts[13].display_name | Robot |
| concepts[14].id | https://openalex.org/C127413603 |
| concepts[14].level | 0 |
| concepts[14].score | 0.248803049325943 |
| concepts[14].wikidata | https://www.wikidata.org/wiki/Q11023 |
| concepts[14].display_name | Engineering |
| concepts[15].id | https://openalex.org/C121332964 |
| concepts[15].level | 0 |
| concepts[15].score | 0.1288733184337616 |
| concepts[15].wikidata | https://www.wikidata.org/wiki/Q413 |
| concepts[15].display_name | Physics |
| concepts[16].id | https://openalex.org/C22212356 |
| concepts[16].level | 1 |
| concepts[16].score | 0.0 |
| concepts[16].wikidata | https://www.wikidata.org/wiki/Q775325 |
| concepts[16].display_name | Transport engineering |
| concepts[17].id | https://openalex.org/C170154142 |
| concepts[17].level | 1 |
| concepts[17].score | 0.0 |
| concepts[17].wikidata | https://www.wikidata.org/wiki/Q150737 |
| concepts[17].display_name | Architectural engineering |
| concepts[18].id | https://openalex.org/C162324750 |
| concepts[18].level | 0 |
| concepts[18].score | 0.0 |
| concepts[18].wikidata | https://www.wikidata.org/wiki/Q8134 |
| concepts[18].display_name | Economics |
| concepts[19].id | https://openalex.org/C10138342 |
| concepts[19].level | 1 |
| concepts[19].score | 0.0 |
| concepts[19].wikidata | https://www.wikidata.org/wiki/Q43015 |
| concepts[19].display_name | Finance |
| concepts[20].id | https://openalex.org/C74650414 |
| concepts[20].level | 1 |
| concepts[20].score | 0.0 |
| concepts[20].wikidata | https://www.wikidata.org/wiki/Q11397 |
| concepts[20].display_name | Classical mechanics |
| concepts[21].id | https://openalex.org/C1276947 |
| concepts[21].level | 1 |
| concepts[21].score | 0.0 |
| concepts[21].wikidata | https://www.wikidata.org/wiki/Q333 |
| concepts[21].display_name | Astronomy |
| keywords[0].id | https://openalex.org/keywords/centroid |
| keywords[0].score | 0.7610754370689392 |
| keywords[0].display_name | Centroid |
| keywords[1].id | https://openalex.org/keywords/artificial-intelligence |
| keywords[1].score | 0.7118788361549377 |
| keywords[1].display_name | Artificial intelligence |
| keywords[2].id | https://openalex.org/keywords/computer-vision |
| keywords[2].score | 0.6977213621139526 |
| keywords[2].display_name | Computer vision |
| keywords[3].id | https://openalex.org/keywords/kinematics |
| keywords[3].score | 0.6804501414299011 |
| keywords[3].display_name | Kinematics |
| keywords[4].id | https://openalex.org/keywords/computer-science |
| keywords[4].score | 0.5950725674629211 |
| keywords[4].display_name | Computer science |
| keywords[5].id | https://openalex.org/keywords/pedestrian |
| keywords[5].score | 0.5796813368797302 |
| keywords[5].display_name | Pedestrian |
| keywords[6].id | https://openalex.org/keywords/trajectory |
| keywords[6].score | 0.5104321837425232 |
| keywords[6].display_name | Trajectory |
| keywords[7].id | https://openalex.org/keywords/inverse-kinematics |
| keywords[7].score | 0.501708984375 |
| keywords[7].display_name | Inverse kinematics |
| keywords[8].id | https://openalex.org/keywords/motion |
| keywords[8].score | 0.49581989645957947 |
| keywords[8].display_name | Motion (physics) |
| keywords[9].id | https://openalex.org/keywords/position |
| keywords[9].score | 0.4582192003726959 |
| keywords[9].display_name | Position (finance) |
| keywords[10].id | https://openalex.org/keywords/inverse-dynamics |
| keywords[10].score | 0.43809768557548523 |
| keywords[10].display_name | Inverse dynamics |
| keywords[11].id | https://openalex.org/keywords/robotics |
| keywords[11].score | 0.4278143048286438 |
| keywords[11].display_name | Robotics |
| keywords[12].id | https://openalex.org/keywords/joint |
| keywords[12].score | 0.413821816444397 |
| keywords[12].display_name | Joint (building) |
| keywords[13].id | https://openalex.org/keywords/robot |
| keywords[13].score | 0.36580729484558105 |
| keywords[13].display_name | Robot |
| keywords[14].id | https://openalex.org/keywords/engineering |
| keywords[14].score | 0.248803049325943 |
| keywords[14].display_name | Engineering |
| keywords[15].id | https://openalex.org/keywords/physics |
| keywords[15].score | 0.1288733184337616 |
| keywords[15].display_name | Physics |
| language | en |
| locations[0].id | doi:10.1051/matecconf/202235503016 |
| locations[0].is_oa | True |
| locations[0].source.id | https://openalex.org/S4210175061 |
| locations[0].source.issn | 2261-236X, 2274-7214 |
| locations[0].source.type | journal |
| locations[0].source.is_oa | True |
| locations[0].source.issn_l | 2261-236X |
| locations[0].source.is_core | True |
| locations[0].source.is_in_doaj | True |
| locations[0].source.display_name | MATEC Web of Conferences |
| locations[0].source.host_organization | https://openalex.org/P4310319748 |
| locations[0].source.host_organization_name | EDP Sciences |
| locations[0].source.host_organization_lineage | https://openalex.org/P4310319748 |
| locations[0].source.host_organization_lineage_names | EDP Sciences |
| locations[0].license | cc-by |
| locations[0].pdf_url | https://www.matec-conferences.org/articles/matecconf/pdf/2022/02/matecconf_icpcm2022_03016.pdf |
| locations[0].version | publishedVersion |
| locations[0].raw_type | journal-article |
| locations[0].license_id | https://openalex.org/licenses/cc-by |
| locations[0].is_accepted | True |
| locations[0].is_published | True |
| locations[0].raw_source_name | MATEC Web of Conferences |
| locations[0].landing_page_url | https://doi.org/10.1051/matecconf/202235503016 |
| locations[1].id | pmh:oai:doaj.org/article:de8b9cad51c046d7bcc1e2eec127a383 |
| locations[1].is_oa | True |
| locations[1].source.id | https://openalex.org/S4306401280 |
| locations[1].source.issn | |
| locations[1].source.type | repository |
| locations[1].source.is_oa | False |
| locations[1].source.issn_l | |
| locations[1].source.is_core | False |
| locations[1].source.is_in_doaj | False |
| locations[1].source.display_name | DOAJ (DOAJ: Directory of Open Access Journals) |
| locations[1].source.host_organization | |
| locations[1].source.host_organization_name | |
| locations[1].license | cc-by-sa |
| locations[1].pdf_url | |
| locations[1].version | submittedVersion |
| locations[1].raw_type | article |
| locations[1].license_id | https://openalex.org/licenses/cc-by-sa |
| locations[1].is_accepted | False |
| locations[1].is_published | False |
| locations[1].raw_source_name | MATEC Web of Conferences, Vol 355, p 03016 (2022) |
| locations[1].landing_page_url | https://doaj.org/article/de8b9cad51c046d7bcc1e2eec127a383 |
| locations[2].id | pmh:oai:edpsciences.org:dkey/10.1051/matecconf/202235503016 |
| locations[2].is_oa | False |
| locations[2].source.id | https://openalex.org/S4306400744 |
| locations[2].source.issn | |
| locations[2].source.type | repository |
| locations[2].source.is_oa | False |
| locations[2].source.issn_l | |
| locations[2].source.is_core | False |
| locations[2].source.is_in_doaj | False |
| locations[2].source.display_name | Springer Link (Chiba Institute of Technology) |
| locations[2].source.host_organization | https://openalex.org/I8488066 |
| locations[2].source.host_organization_name | Chiba Institute of Technology |
| locations[2].source.host_organization_lineage | https://openalex.org/I8488066 |
| locations[2].license | |
| locations[2].pdf_url | |
| locations[2].version | submittedVersion |
| locations[2].raw_type | Text |
| locations[2].license_id | |
| locations[2].is_accepted | False |
| locations[2].is_published | False |
| locations[2].raw_source_name | https://doi.org/10.1051/matecconf/202235503016 |
| locations[2].landing_page_url | |
| indexed_in | crossref, doaj |
| authorships[0].author.id | https://openalex.org/A5100568289 |
| authorships[0].author.orcid | |
| authorships[0].author.display_name | Rongyong Zhao |
| authorships[0].countries | CN |
| authorships[0].affiliations[0].institution_ids | https://openalex.org/I116953780 |
| authorships[0].affiliations[0].raw_affiliation_string | College of Electronic and Information Engineering, Tongji University, Shanghai, 201804, China |
| authorships[0].institutions[0].id | https://openalex.org/I116953780 |
| authorships[0].institutions[0].ror | https://ror.org/03rc6as71 |
| authorships[0].institutions[0].type | education |
| authorships[0].institutions[0].lineage | https://openalex.org/I116953780 |
| authorships[0].institutions[0].country_code | CN |
| authorships[0].institutions[0].display_name | Tongji University |
| authorships[0].author_position | first |
| authorships[0].raw_author_name | Rongyong Zhao |
| authorships[0].is_corresponding | False |
| authorships[0].raw_affiliation_strings | College of Electronic and Information Engineering, Tongji University, Shanghai, 201804, China |
| authorships[1].author.id | https://openalex.org/A5100322727 |
| authorships[1].author.orcid | https://orcid.org/0000-0002-5823-4817 |
| authorships[1].author.display_name | Yan Wang |
| authorships[1].countries | CN |
| authorships[1].affiliations[0].institution_ids | https://openalex.org/I116953780 |
| authorships[1].affiliations[0].raw_affiliation_string | College of Electronic and Information Engineering, Tongji University, Shanghai, 201804, China |
| authorships[1].institutions[0].id | https://openalex.org/I116953780 |
| authorships[1].institutions[0].ror | https://ror.org/03rc6as71 |
| authorships[1].institutions[0].type | education |
| authorships[1].institutions[0].lineage | https://openalex.org/I116953780 |
| authorships[1].institutions[0].country_code | CN |
| authorships[1].institutions[0].display_name | Tongji University |
| authorships[1].author_position | middle |
| authorships[1].raw_author_name | Yan Wang |
| authorships[1].is_corresponding | False |
| authorships[1].raw_affiliation_strings | College of Electronic and Information Engineering, Tongji University, Shanghai, 201804, China |
| authorships[2].author.id | https://openalex.org/A5036833830 |
| authorships[2].author.orcid | https://orcid.org/0000-0002-9620-8740 |
| authorships[2].author.display_name | Chuanfeng Han |
| authorships[2].countries | CN |
| authorships[2].affiliations[0].institution_ids | https://openalex.org/I116953780 |
| authorships[2].affiliations[0].raw_affiliation_string | College of Electronic and Information Engineering, Tongji University, Shanghai, 201804, China |
| authorships[2].institutions[0].id | https://openalex.org/I116953780 |
| authorships[2].institutions[0].ror | https://ror.org/03rc6as71 |
| authorships[2].institutions[0].type | education |
| authorships[2].institutions[0].lineage | https://openalex.org/I116953780 |
| authorships[2].institutions[0].country_code | CN |
| authorships[2].institutions[0].display_name | Tongji University |
| authorships[2].author_position | middle |
| authorships[2].raw_author_name | Chuanfeng Han |
| authorships[2].is_corresponding | True |
| authorships[2].raw_affiliation_strings | College of Electronic and Information Engineering, Tongji University, Shanghai, 201804, China |
| authorships[3].author.id | https://openalex.org/A5054698723 |
| authorships[3].author.orcid | https://orcid.org/0000-0003-2392-5949 |
| authorships[3].author.display_name | Ping Jia |
| authorships[3].countries | CN |
| authorships[3].affiliations[0].institution_ids | https://openalex.org/I116953780 |
| authorships[3].affiliations[0].raw_affiliation_string | College of Electronic and Information Engineering, Tongji University, Shanghai, 201804, China |
| authorships[3].institutions[0].id | https://openalex.org/I116953780 |
| authorships[3].institutions[0].ror | https://ror.org/03rc6as71 |
| authorships[3].institutions[0].type | education |
| authorships[3].institutions[0].lineage | https://openalex.org/I116953780 |
| authorships[3].institutions[0].country_code | CN |
| authorships[3].institutions[0].display_name | Tongji University |
| authorships[3].author_position | middle |
| authorships[3].raw_author_name | Ping Jia |
| authorships[3].is_corresponding | False |
| authorships[3].raw_affiliation_strings | College of Electronic and Information Engineering, Tongji University, Shanghai, 201804, China |
| authorships[4].author.id | https://openalex.org/A5025063553 |
| authorships[4].author.orcid | https://orcid.org/0000-0003-2283-579X |
| authorships[4].author.display_name | Cuiling Li |
| authorships[4].countries | CN |
| authorships[4].affiliations[0].institution_ids | https://openalex.org/I116953780 |
| authorships[4].affiliations[0].raw_affiliation_string | College of Electronic and Information Engineering, Tongji University, Shanghai, 201804, China |
| authorships[4].institutions[0].id | https://openalex.org/I116953780 |
| authorships[4].institutions[0].ror | https://ror.org/03rc6as71 |
| authorships[4].institutions[0].type | education |
| authorships[4].institutions[0].lineage | https://openalex.org/I116953780 |
| authorships[4].institutions[0].country_code | CN |
| authorships[4].institutions[0].display_name | Tongji University |
| authorships[4].author_position | middle |
| authorships[4].raw_author_name | Cuiling Li |
| authorships[4].is_corresponding | False |
| authorships[4].raw_affiliation_strings | College of Electronic and Information Engineering, Tongji University, Shanghai, 201804, China |
| authorships[5].author.id | https://openalex.org/A5016266515 |
| authorships[5].author.orcid | https://orcid.org/0009-0008-9461-7656 |
| authorships[5].author.display_name | Wenjie Zhu |
| authorships[5].countries | CN |
| authorships[5].affiliations[0].institution_ids | https://openalex.org/I116953780 |
| authorships[5].affiliations[0].raw_affiliation_string | College of Electronic and Information Engineering, Tongji University, Shanghai, 201804, China |
| authorships[5].institutions[0].id | https://openalex.org/I116953780 |
| authorships[5].institutions[0].ror | https://ror.org/03rc6as71 |
| authorships[5].institutions[0].type | education |
| authorships[5].institutions[0].lineage | https://openalex.org/I116953780 |
| authorships[5].institutions[0].country_code | CN |
| authorships[5].institutions[0].display_name | Tongji University |
| authorships[5].author_position | last |
| authorships[5].raw_author_name | Wenjie Zhu |
| authorships[5].is_corresponding | False |
| authorships[5].raw_affiliation_strings | College of Electronic and Information Engineering, Tongji University, Shanghai, 201804, China |
| has_content.pdf | True |
| has_content.grobid_xml | True |
| is_paratext | False |
| open_access.is_oa | True |
| open_access.oa_url | https://www.matec-conferences.org/articles/matecconf/pdf/2022/02/matecconf_icpcm2022_03016.pdf |
| open_access.oa_status | diamond |
| open_access.any_repository_has_fulltext | False |
| created_date | 2025-10-10T00:00:00 |
| display_name | Pedestrian motion centroid model based on robot dynamics |
| has_fulltext | True |
| is_retracted | False |
| updated_date | 2025-11-06T03:46:38.306776 |
| primary_topic.id | https://openalex.org/T12740 |
| primary_topic.field.id | https://openalex.org/fields/22 |
| primary_topic.field.display_name | Engineering |
| primary_topic.score | 0.996999979019165 |
| primary_topic.domain.id | https://openalex.org/domains/3 |
| primary_topic.domain.display_name | Physical Sciences |
| primary_topic.subfield.id | https://openalex.org/subfields/2204 |
| primary_topic.subfield.display_name | Biomedical Engineering |
| primary_topic.display_name | Gait Recognition and Analysis |
| related_works | https://openalex.org/W2381926679, https://openalex.org/W2392100589, https://openalex.org/W2512789322, https://openalex.org/W2007009951, https://openalex.org/W2101960027, https://openalex.org/W2197846993, https://openalex.org/W1976827262, https://openalex.org/W49697837, https://openalex.org/W3122828758, https://openalex.org/W2572731987 |
| cited_by_count | 0 |
| locations_count | 3 |
| best_oa_location.id | doi:10.1051/matecconf/202235503016 |
| best_oa_location.is_oa | True |
| best_oa_location.source.id | https://openalex.org/S4210175061 |
| best_oa_location.source.issn | 2261-236X, 2274-7214 |
| best_oa_location.source.type | journal |
| best_oa_location.source.is_oa | True |
| best_oa_location.source.issn_l | 2261-236X |
| best_oa_location.source.is_core | True |
| best_oa_location.source.is_in_doaj | True |
| best_oa_location.source.display_name | MATEC Web of Conferences |
| best_oa_location.source.host_organization | https://openalex.org/P4310319748 |
| best_oa_location.source.host_organization_name | EDP Sciences |
| best_oa_location.source.host_organization_lineage | https://openalex.org/P4310319748 |
| best_oa_location.source.host_organization_lineage_names | EDP Sciences |
| best_oa_location.license | cc-by |
| best_oa_location.pdf_url | https://www.matec-conferences.org/articles/matecconf/pdf/2022/02/matecconf_icpcm2022_03016.pdf |
| best_oa_location.version | publishedVersion |
| best_oa_location.raw_type | journal-article |
| best_oa_location.license_id | https://openalex.org/licenses/cc-by |
| best_oa_location.is_accepted | True |
| best_oa_location.is_published | True |
| best_oa_location.raw_source_name | MATEC Web of Conferences |
| best_oa_location.landing_page_url | https://doi.org/10.1051/matecconf/202235503016 |
| primary_location.id | doi:10.1051/matecconf/202235503016 |
| primary_location.is_oa | True |
| primary_location.source.id | https://openalex.org/S4210175061 |
| primary_location.source.issn | 2261-236X, 2274-7214 |
| primary_location.source.type | journal |
| primary_location.source.is_oa | True |
| primary_location.source.issn_l | 2261-236X |
| primary_location.source.is_core | True |
| primary_location.source.is_in_doaj | True |
| primary_location.source.display_name | MATEC Web of Conferences |
| primary_location.source.host_organization | https://openalex.org/P4310319748 |
| primary_location.source.host_organization_name | EDP Sciences |
| primary_location.source.host_organization_lineage | https://openalex.org/P4310319748 |
| primary_location.source.host_organization_lineage_names | EDP Sciences |
| primary_location.license | cc-by |
| primary_location.pdf_url | https://www.matec-conferences.org/articles/matecconf/pdf/2022/02/matecconf_icpcm2022_03016.pdf |
| primary_location.version | publishedVersion |
| primary_location.raw_type | journal-article |
| primary_location.license_id | https://openalex.org/licenses/cc-by |
| primary_location.is_accepted | True |
| primary_location.is_published | True |
| primary_location.raw_source_name | MATEC Web of Conferences |
| primary_location.landing_page_url | https://doi.org/10.1051/matecconf/202235503016 |
| publication_date | 2022-01-01 |
| publication_year | 2022 |
| referenced_works | https://openalex.org/W2396633254, https://openalex.org/W3002979680, https://openalex.org/W2943768383, https://openalex.org/W3011260014, https://openalex.org/W2158301611, https://openalex.org/W2736384915 |
| referenced_works_count | 6 |
| abstract_inverted_index.a | 125 |
| abstract_inverted_index.By | 130 |
| abstract_inverted_index.In | 0 |
| abstract_inverted_index.an | 17 |
| abstract_inverted_index.as | 21 |
| abstract_inverted_index.be | 141, 149 |
| abstract_inverted_index.in | 58 |
| abstract_inverted_index.is | 36, 111, 121 |
| abstract_inverted_index.of | 7, 34, 38, 47, 74, 80, 90, 97, 108, 117 |
| abstract_inverted_index.to | 66, 86, 123 |
| abstract_inverted_index.The | 32, 106 |
| abstract_inverted_index.and | 29, 63, 77, 101, 113, 143 |
| abstract_inverted_index.are | 104 |
| abstract_inverted_index.can | 43, 140, 148 |
| abstract_inverted_index.end | 82 |
| abstract_inverted_index.has | 15 |
| abstract_inverted_index.law | 139 |
| abstract_inverted_index.one | 37 |
| abstract_inverted_index.the | 4, 39, 45, 54, 68, 72, 78, 81, 87, 91, 95, 98, 114, 132, 136, 144 |
| abstract_inverted_index.This | 50 |
| abstract_inverted_index.body | 13 |
| abstract_inverted_index.bone | 99 |
| abstract_inverted_index.each | 75 |
| abstract_inverted_index.find | 67 |
| abstract_inverted_index.from | 61 |
| abstract_inverted_index.mass | 35 |
| abstract_inverted_index.more | 150 |
| abstract_inverted_index.pose | 79 |
| abstract_inverted_index.such | 20 |
| abstract_inverted_index.that | 42 |
| abstract_inverted_index.with | 3 |
| abstract_inverted_index.Then, | 84 |
| abstract_inverted_index.angle | 103 |
| abstract_inverted_index.biped | 55 |
| abstract_inverted_index.first | 52 |
| abstract_inverted_index.human | 12, 92 |
| abstract_inverted_index.joint | 76, 93, 102, 119 |
| abstract_inverted_index.model | 57, 89 |
| abstract_inverted_index.paper | 51 |
| abstract_inverted_index.rapid | 5 |
| abstract_inverted_index.robot | 56 |
| abstract_inverted_index.task, | 19 |
| abstract_inverted_index.become | 16 |
| abstract_inverted_index.centre | 33 |
| abstract_inverted_index.deeply | 151 |
| abstract_inverted_index.factor | 110 |
| abstract_inverted_index.model. | 129 |
| abstract_inverted_index.moment | 107 |
| abstract_inverted_index.motion | 115, 127 |
| abstract_inverted_index.points | 120 |
| abstract_inverted_index.recent | 1 |
| abstract_inverted_index.target | 23 |
| abstract_inverted_index.vision | 9 |
| abstract_inverted_index.years, | 2 |
| abstract_inverted_index.between | 71 |
| abstract_inverted_index.dynamic | 134 |
| abstract_inverted_index.forward | 62 |
| abstract_inverted_index.inertia | 109 |
| abstract_inverted_index.inverse | 64 |
| abstract_inverted_index.mapping | 69 |
| abstract_inverted_index.points, | 94 |
| abstract_inverted_index.posture | 27, 100 |
| abstract_inverted_index.reflect | 44 |
| abstract_inverted_index.centroid | 128 |
| abstract_inverted_index.computer | 8 |
| abstract_inverted_index.explored | 142 |
| abstract_inverted_index.movement | 146 |
| abstract_inverted_index.position | 73 |
| abstract_inverted_index.research | 14 |
| abstract_inverted_index.skeleton | 88 |
| abstract_inverted_index.starting | 60 |
| abstract_inverted_index.behaviour | 30 |
| abstract_inverted_index.centroid, | 135 |
| abstract_inverted_index.different | 118 |
| abstract_inverted_index.effector. | 83 |
| abstract_inverted_index.establish | 124 |
| abstract_inverted_index.important | 18, 40 |
| abstract_inverted_index.mechanism | 147 |
| abstract_inverted_index.movement. | 49 |
| abstract_inverted_index.robotics, | 59 |
| abstract_inverted_index.tracking, | 26 |
| abstract_inverted_index.considered | 122 |
| abstract_inverted_index.detection, | 24 |
| abstract_inverted_index.equivalent | 133 |
| abstract_inverted_index.estimation | 28 |
| abstract_inverted_index.introduces | 53 |
| abstract_inverted_index.kinematics | 138 |
| abstract_inverted_index.pedestrian | 22, 48, 126, 137, 145 |
| abstract_inverted_index.phenomenon | 46 |
| abstract_inverted_index.trajectory | 25 |
| abstract_inverted_index.calculating | 131 |
| abstract_inverted_index.determined. | 105 |
| abstract_inverted_index.development | 6 |
| abstract_inverted_index.image-based | 11 |
| abstract_inverted_index.introduced, | 112 |
| abstract_inverted_index.kinematics, | 65 |
| abstract_inverted_index.recognized. | 152 |
| abstract_inverted_index.technology, | 10 |
| abstract_inverted_index.recognition. | 31 |
| abstract_inverted_index.relationship | 70 |
| abstract_inverted_index.corresponding | 85 |
| abstract_inverted_index.superposition | 116 |
| abstract_inverted_index.characteristics | 41, 96 |
| cited_by_percentile_year | |
| corresponding_author_ids | https://openalex.org/A5036833830 |
| countries_distinct_count | 1 |
| institutions_distinct_count | 6 |
| corresponding_institution_ids | https://openalex.org/I116953780 |
| sustainable_development_goals[0].id | https://metadata.un.org/sdg/16 |
| sustainable_development_goals[0].score | 0.5099999904632568 |
| sustainable_development_goals[0].display_name | Peace, Justice and strong institutions |
| citation_normalized_percentile.value | 0.00430699 |
| citation_normalized_percentile.is_in_top_1_percent | False |
| citation_normalized_percentile.is_in_top_10_percent | False |